Većina četvoronožnih robota napušta dizajn sa kičmom zbog jednostavnosti. NeRmo usvaja ovaj složeni sistem. Četvoronožni roboti poput Boston Dynamics Spot i Cheetah svoju agilnost gotovo u potpunosti duguju veštini pokreta nogu. Iako se vizuelno kreću slično svojim sisavcima, anatomski uzori uglavnom se zaustavljaju na nogama. Međutim, u biologiji, pokreti, fleksibilnost i složene motoričke funkcije četvoronožnih životinja proizlaze gotovo isključivo iz kičme. Replicirati taj složeni sistem složenih pršljenova u robotima je mnogo teže nego kod nogu, ali ako bi veštačke kičme mogle biti integrisane u takve dizajne, inženjeri bi mogli otvoriti potpuno nove puteve precizne pokretljivosti.
NeRmo robot – Pišući u časopisu Science Robotics, saradnici iz Nemačke i Kine predstavili su NeRmo, biomimetičnog četvoronožnog robota koji se oslanja na novi okvir motora i tetiva kako bi se brzo kretao.
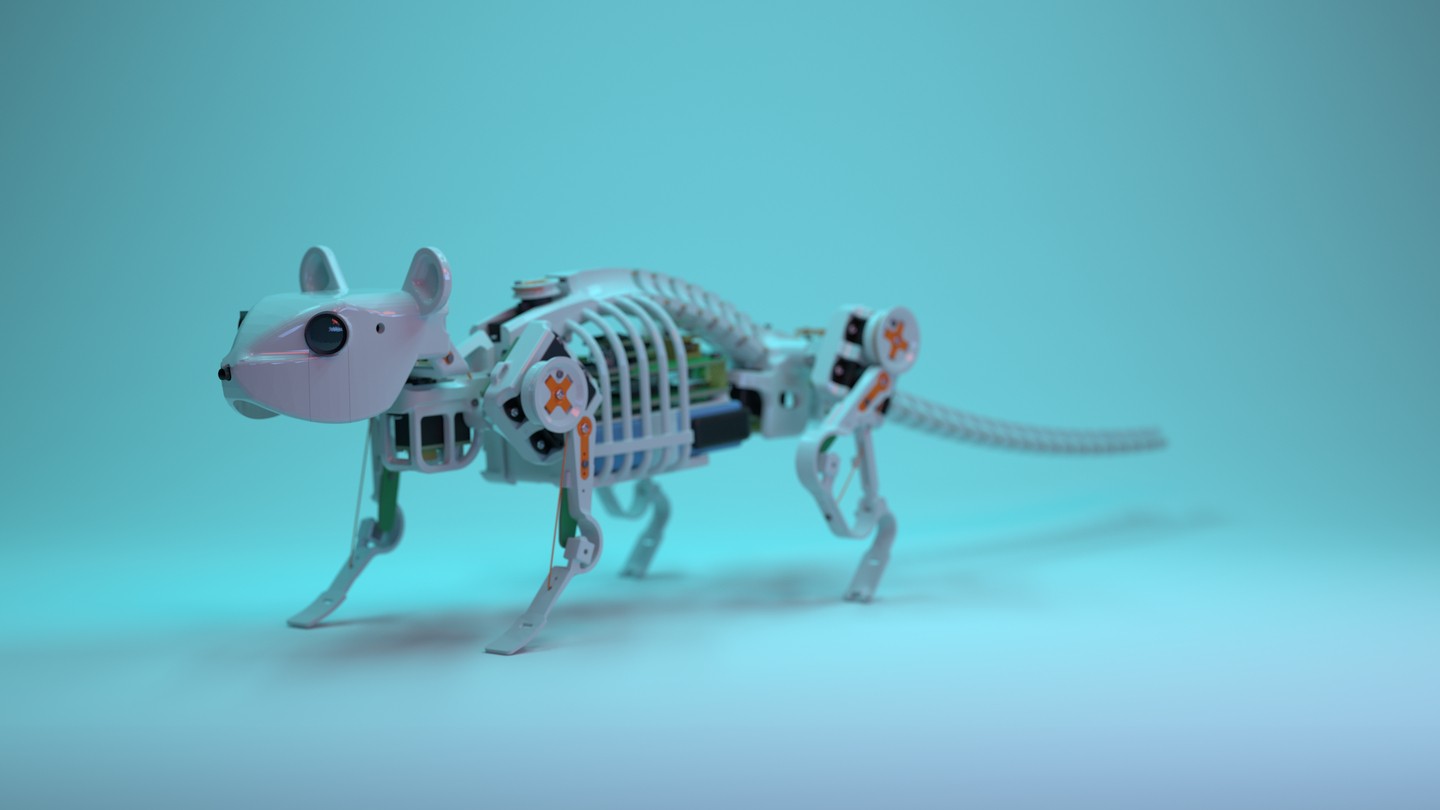
Što se izgleda tiče, NeRmo odražava skelet miša – iako su uši, iako slatke, verovatno suvišne. Čvrsti prednji deo robota sadrži elektronske sisteme, dok zadnji deo funkcioniše poput stvarne fleksibilne kičme, sa četiri lumbalna i lateralna spoja. Veštačke tetive prolaze kroz kičmu, kao i kroz laktove i kolena robota, što omogućava NeRmu pokrete slične miševima uz brže vreme okretanja. Prema saradnicima na Tehničkom univerzitetu u Minhenu, Univerzitetu tehnologije u Nurembergu i kineskom Sun Yat-Sen univerzitetu, NeRmov sistem tetiva i čeonih kaiševa eliminise potrebu za bilo kakvom muskulaturom, omogućavajući istovremeno glatko savijanje po bočnim i sagitalnim ravnima, odnosno s leva na desno, i odozgo prema dole.
Da bi testirali svoj novi dizajn, tim je NeRma podvrgao seriji od četiri eksperimenta kako bi pokazao statičko balansiranje, hodanje pravo, agilno okretanje i navigaciju kroz lavirint. Svako ispitivanje uključivalo je dva kruga – jedan s angažovanom kičmom i drugi bez nje. NeRmo je prema svim parametrima bolje, brže i preciznije obavljao zadatke kada je integrisao kičmu u svoje pokrete.
Međutim, navigacija kroz lavirint bila je pravi trenutak sjaja za NeRmo. Sa angažovanom kičmom, miš-robot je završavao svoje trke kroz lavirint prosečno 30 posto brže nego kada bi jednostavno šetao bez kičme. Iako je još uvek u ranoj fazi, istraživači veruju da bi dalje podešavanje dizajna i integracija sistema kičme u buduće četvoronožne robote mogli značajno poboljšati njihovu funkcionalnost. Ako NeRmo već nije dovoljan dokaz, razmislite ovako – MIT-ov Cheetah može galopirati brzinom od 13 stopa u sekundi sa samo jednim aktuiranim zglobom koji imitira savijanje kičme u sagitalnoj ravni. NeRmo, s druge strane, ima osam zglobova.





